Un illustre mathématicien disait que parmi les branches des mathématiques, il y a celle qui étudiait le nombre, l'aspect arithmétique, celle qui étudiait la grandeur, l'aspect métrique (ou analytique), et celle qui étudiait la forme, l'aspect géométrique des choses. La topologie se range plutôt dans la troisième catégorie.
Au début, la géométrie s'intéressait aux figures géométriques qui possédaient certaines propriétés en communs. La géométrie s'est élargie, on a étudié des figures qui semblaient de moins en moins différentes, mais qui possédaient quand même certaines propriétés en commun. La géométrie est vue comme l'étude des transformations des figures.
La Géométrie Euclidienne
C'est la plus ancienne des géométries. On s'intéresse aux transformations qui conservent la distance, autrement dit on considère que deux figures  sont équivalentes du point de vue de la géométrie euclidienne s'il existe une isométrie de
sont équivalentes du point de vue de la géométrie euclidienne s'il existe une isométrie de  vers
vers  . Par exemple, deux triangles congruents (qu'on peut superposer l'un sur l'autre) sont de telles figures :
. Par exemple, deux triangles congruents (qu'on peut superposer l'un sur l'autre) sont de telles figures :
La Géométrie Affine
Ensuite, on a considéré à une classe plus large de transformations : les similitudes (ou transformations affines). Ici, on exige que les rapports de longeurs soient préservés i.e, F est similaire à F' si A, B et C sont les points d'une figure F, que A', B' et C' soient les points correspondants sur la figure F', le rapport suivant soit conservé :

Autrement dit, qu'il existe une constante  tel que
tel que  . est appellé le "rapport de similitude". Par exemple, les deux figures suivantes sont alors dites semblables :
. est appellé le "rapport de similitude". Par exemple, les deux figures suivantes sont alors dites semblables :

On remarque que deux figures congruentes sont toujours semblable, l'inverse n'est pas forcément vrai. La géométrie affine "englobe" donc la géométrie euclidienne. Il existe une géométrie encore plus générale :
La Géométrie Projective
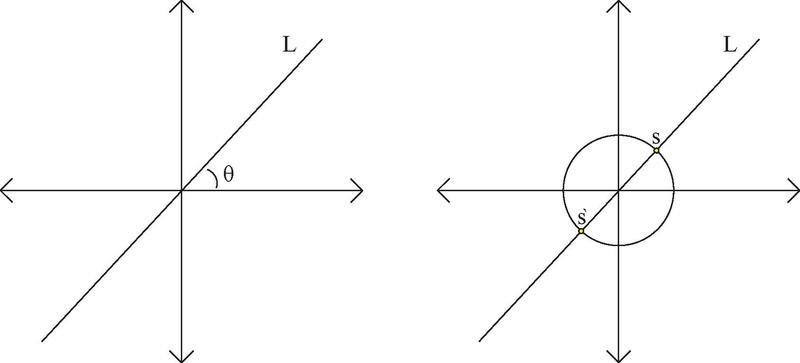
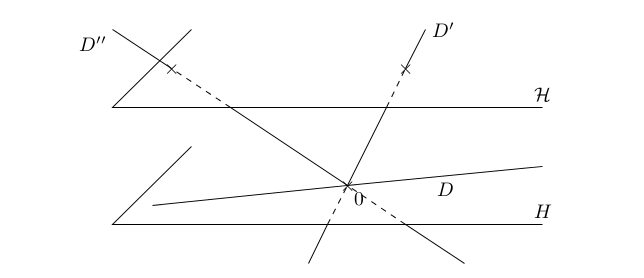
Si le soleil "projette" notre ombre sur le sol plat, on a pas conservation des rapports de longeurs, notre ombre n'est pas un "réduction" de notre corps, mais certains rapports sont conservés, les birapports de longueurs. (les rapports de rapports de longueur) Sans rentrer dans les détails, ici on s'intéresse aux transformations appellées transformations de Möbius : c'est une transformation complexe de la forme :  (avec ad - bc non nul)
(avec ad - bc non nul)
Les déformations tolérées sont encore plus grandes, notamment n'importe quelle conique est "projectivement équivalente" à une autre ! Il en va de même pour ces deux objets en rouge :
Peut-on encore plus déformer les objets, et toujours conserver certaines propriétés ? La réponse est oui, et elle nous est donnée par la topologie.
La Topologie
 C'est ça la topologie !
C'est ça la topologie !
Pour le topologue, une tasse de café et un donut représentent le même objet. En fait, la topologie est l'étude des formes et des déformations. On l'appelle parfois "la géométrie du caoutchouc". Donc, on ne s'intéresse pas par exemple à la notion d'angle, qui est une notion géométrique. Nos figures seront des espaces. On va considérer deux espaces X et Y. On va dire que si  est une bijection continue, alors on peut "déformer X continuement en Y". Si de plus,
est une bijection continue, alors on peut "déformer X continuement en Y". Si de plus,  est aussi continue, alors on peut "déformer continuement Y en X", et les deux objets sont les mêmes d'un point de vue topologique. On appelle une telle fonction un homéomorphisme. On peut remarquer que les homéomorphismes sont à la topologie ce que les similitudes sont à la géométrie affine.
est aussi continue, alors on peut "déformer continuement Y en X", et les deux objets sont les mêmes d'un point de vue topologique. On appelle une telle fonction un homéomorphisme. On peut remarquer que les homéomorphismes sont à la topologie ce que les similitudes sont à la géométrie affine.
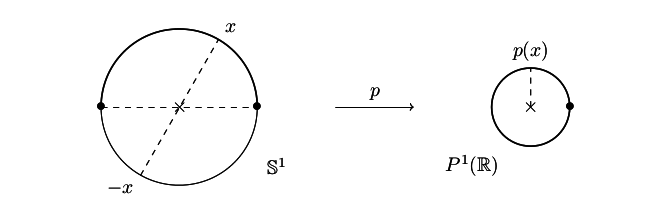
Si est une bijection continue, on ne sait pas si  est un homéomorphisme. Par exemple, l'application qui envoie le segment
est un homéomorphisme. Par exemple, l'application qui envoie le segment  sur
sur  , le cercle unitée,
, le cercle unitée,  est continue mais n'est pas bicontinue. Cette fonction n'est donc pas un homéomorphisme. (En fait, le cercle et le segment ne sont pas homéomorphe. L'argument le plus simple est un argument de connexité.)
est continue mais n'est pas bicontinue. Cette fonction n'est donc pas un homéomorphisme. (En fait, le cercle et le segment ne sont pas homéomorphe. L'argument le plus simple est un argument de connexité.)
Qu'est ce qu'une fonction continue ?
En fait, la notion "être continue" est très vague. Intuitivement, une fonction est continue si il n'y a pas de "déchirure", donc si f(x) peut être voisin de f(y) à condition que x et y soit voisin, pour tout x de X et pour tout y voisin de x. Cette notion étant un peu vague, il faut qu'on décide quelles fonctions sont continues, et quelles fonctions ne le sont pas. Pour ça, on va prendre notre espace  , et lui ajouter une topologie
, et lui ajouter une topologie  . Cette topologie est un ensemble de parties de , qu'on appelle ouverts. Ils vérifient trois axiomes :
. Cette topologie est un ensemble de parties de , qu'on appelle ouverts. Ils vérifient trois axiomes :

- si
 , alors
, alors  (autrement dit, toute union d'ouverts est ouverte)
(autrement dit, toute union d'ouverts est ouverte)
- si
 alors
alors  . (autrement dit, toute intersection finie de fermés est fermée)
. (autrement dit, toute intersection finie de fermés est fermée)
A présent, qu'on a nos ouverts, on va dire que notre fonction  est continue si et seulement si
est continue si et seulement si
 , on a
, on a 
i.e la préimage de tout ouvert de Y est un ouvert dans X. Nos ouverts vont jouer à peu de choses près le rôle des voisinages.
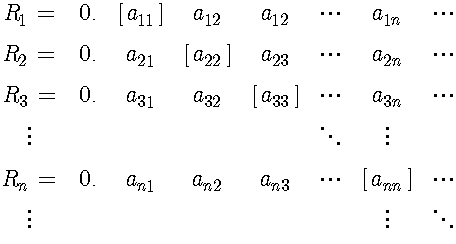
On peut voir un premier exemple avec les ouverts dans  . On va définir les ouverts comme étant les ensembles :
. On va définir les ouverts comme étant les ensembles :  tel que
tel que  . Comme on voit que les axiomes sont bien vérifiés, on retrouve une topologie. En particulier, la notion de fonction continue coïncide, puisque la définition de la continuité de
. Comme on voit que les axiomes sont bien vérifiés, on retrouve une topologie. En particulier, la notion de fonction continue coïncide, puisque la définition de la continuité de  en
en  qu'on voit est :
qu'on voit est :
 , ce qui est exactement la définition d'un ouvert !
, ce qui est exactement la définition d'un ouvert !
Les invariants topologiques
La notion de fonction continue est très importante en topologie, puisqu'on va s'intéresser au propriétés invariantes par homéomorphisme, donc que les bijections bicontinues conservent.
Notamment, la propriété d'être compact, connexe ou d'être séparé est un invariant topologique. "Être un invariant topologique" signifie que si possède cette propriété, et que  est homéomorphe à (relation qu'on note d'habitude
est homéomorphe à (relation qu'on note d'habitude  ), alors la possède aussi. Conséquemment, si possède une propriété invariante par homéomorphisme que ne possède pas, cela signifie qu'ils ne sont pas homéomorphes.
), alors la possède aussi. Conséquemment, si possède une propriété invariante par homéomorphisme que ne possède pas, cela signifie qu'ils ne sont pas homéomorphes.
Toutefois, il peut arriver des surprises avec des topologies, par exemple le cas d'une suite de convergente qui admet plusieurs limites (cela arrive quand il n'y a pas suffisament d'ouvert pour distinguer tout les points de l'espace ).
Le sinus du topologue
Un exemple de courbe qu'on étudie en topologie est le sinus du topologue, l'ensemble défini par :  où
où 

On obtient alors l'image suivante :

Le segment vertical à gauche représente et la courbe représente  . Sa propriété particulière est d'être connexe, d'être "d'un seul morceau" mais pas localement connexe : autrement dit, il est globalement "d'un seul morceau", mais si on zoome, même aussi près qu'on veut, près d'un point de , on ne peut pas trouver de point de et un
. Sa propriété particulière est d'être connexe, d'être "d'un seul morceau" mais pas localement connexe : autrement dit, il est globalement "d'un seul morceau", mais si on zoome, même aussi près qu'on veut, près d'un point de , on ne peut pas trouver de point de et un  tel que
tel que  (où
(où  désigne le disque de rayon
désigne le disque de rayon  >0) soit connexe : autrement dit, même en zoomant toujours, il y aura des petits bouts de droites qui ne sont pas reliés, connecté entre elles. (Faites un dessin, et dessinez cette boule : Il y aura toujours un petit bout de droite qui ne sera pas relié à ...)
>0) soit connexe : autrement dit, même en zoomant toujours, il y aura des petits bouts de droites qui ne sont pas reliés, connecté entre elles. (Faites un dessin, et dessinez cette boule : Il y aura toujours un petit bout de droite qui ne sera pas relié à ...)
Voilà donc un bref aperçu de ce qu'est la topologie ! Elle est indispensable dans des domaines tel que l'analyse, la géométrie ou la topologie algébrique (si, si ...)





![[\alpha, \beta, \gamma, \delta] = \frac{(\alpha - \gamma)(\beta-\delta)}{(\alpha - \delta)(\beta-\gamma)}\cdot](http://upload.wikimedia.org/math/c/5/7/c57e781917fba53795460ed016c7086a.png) (les lettres grecques étant des nombres complexes.)
(les lettres grecques étant des nombres complexes.)